
























O 30ª congresso Ecaade (Education and Research in Computer-aided Architectural Design in Europe), realizado em Praga na semana de 10 a 14 de setembro de 2012, mostrou que a área de Computer-aided Architectural Design está se dirigindo mais uma vez para novas fronteiras da interdisciplinaridade. Segundo Henry Achten, coordenador do Molab e organizador do congresso juntamente com Dana Matejovska, a “Revolução Digital”, iniciada há algumas décadas, está longe de ter terminado. Ela está apenas tornando-se cada vez mais física, enquanto as transformações na maneira de pensar, projetar e construir a arquitetura continuam ocorrendo em um ritmo cada vez mais acelerado. Com o tema Digital Physicality/Physical Digitality, o congresso teve este ano um número recorde de participantes e de publicação de artigos, com cerca de 180 trabalhos de pesquisadores europeus e de outros continentes. A lista completa de apresentações pode ser vista no site.
Na primeira década do século XXI os trabalhos apresentados nos congressos Ecaade, assim como nos demais congressos internacionais da área, enfatizavam a técnica inicialmente conhecida como prototipagem rápida e logo depois rebatizada de fabricação digital, passando a envolver mais que a produção de protótipos por sistemas aditivos. Motivados pela necessidade de produzir edifícios com formas especiais, os pesquisadores passaram a estabelecer parcerias com a indústria de materiais de construção e a investigar novos meios de produção controlados por computador, como o corte a laser, a plasma e por jato de água. Nos últimos anos daquela década, no entanto, a modelagem paramétrica começou a competir com esse tema, em especial após o lançamento e popularização de softwares como o Generative Components da Bentley e, mais recentemente, o Grasshopper da Mc Neil.
A partir da segunda década do século XXI a modelagem paramétrica e a fabricação digital se mesclaram e teve início o estudo sobre o uso da robótica na produção arquitetônica. A tendência já podia ser observada nos dois últimos Ecaades, porém ainda de maneira especulativa. Mas no último Acadia (congresso de Caad norte-americano), realizado em Calgary, no Canadá, e neste Ecaade, os robôs apareceram de maneira massiva e em uma série de diferentes aplicações.
Na Europa, assim como nos Estados Unidos, a automação está presente por todas as partes, e não apenas na indústria: no caixa dos supermercados, das livrarias, nos lockers das estações de trem e aeroportos, e até mesmo em algumas redes de fast food, onde o pedido pode ser feito em um terminal. A automação dos setores de serviços e indústria faz sentido não apenas pelo custo elevado da mão de obra, mas também porque nesses países a grande maioria das pessoas cursou nível superior e não está disposta a realizar trabalhos repetitivos. Na arquitetura, contudo, o uso dos robôs não está ligado ao custo da mão de obra, e sim à possibilidade de fabricação de formas complexas com uma precisão antes inimaginável.
Um dos grupos pioneiros no trabalho com robôs é o dos arquitetos Gramazio e Kohler, do laboratório Dfab, na ETH Zurich. O grupo não apenas desenvolveu software e realizou testes especulativos com diferentes métodos de uso dos robôs, como efetivamente realizou aplicações arquitetônicas, produzindo painéis de tijolos com formas complexas que foram utilizados, por exemplo, no edifício de uma vinícola na Suiça.
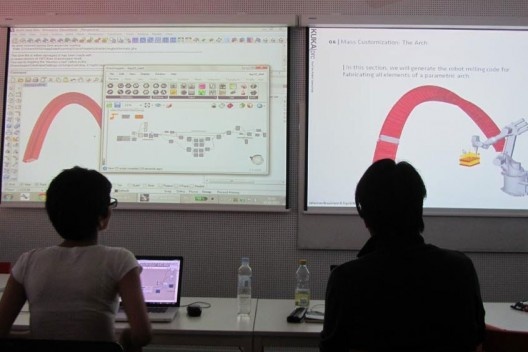
No Ecaade deste ano a apresentação de novos métodos para a integração do uso dos robôs no processo de produção do edifício promete popularizar ainda mais esses equipamentos, que já são comuns há muito tempo na indústria automotiva. Uma das principais contribuições para essa popularização é o desenvolvimento de componentes para Grasshopper que permitem realizar simulações computacionais do uso dos robôs na execução de um projeto, produzindo animações em tempo real dentro do software Rhinoceros. Esse foi o tema de um dos workshops que precederam o Ecaade deste ano, oferecido por uma equipe de arquitetos que trabalha com o patrocínio de uma empresa de automação e oferece consultoria para grandes firmas de arquitetura.
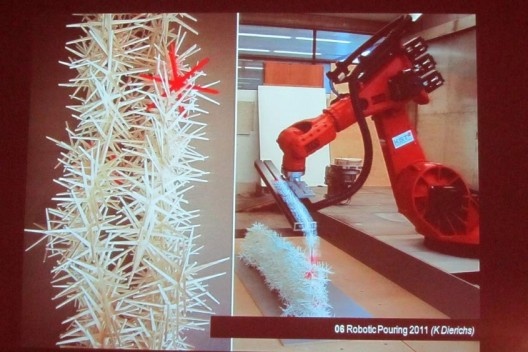
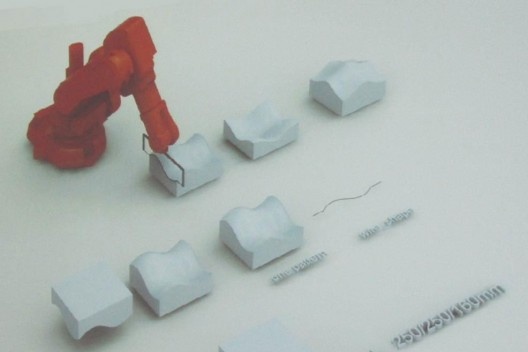
Segundo o grupo austríaco Robots in Architecture, diversas indústrias automotivas européias estão sendo desativadas e os mesmos braços mecânicos que antes instalavam para-brisas e apertavam parafusos são vendidos agora a preços “módicos”, podendo ser facilmente “reeducados” para produzir componentes para a construção civil. As duas maiores vantagens do uso desses equipamentos com relação aos demais sistemas de fabricação digital são a maior flexibilidade em termos de eixos de rotação e a variedade em termos de métodos de produção. Na ponta de um braço mecânico é possível parafusar qualquer coisa: uma fresadora para usinar materiais maciços, um arco aquecido para cortar isopor, pinças para empilhar tijolos ou para encurvar tubos, diferentes tipos de sprays, marteletes, enfim, tudo o que se pode imaginar. Isso tem feito com que o foco dos trabalhos de pesquisa nessa área se concentre agora na criação de diferentes ferramentas e métodos de produção que tiram partido da flexibilidade e força do braço mecânico.
A exemplo do que aconteceu no final da primeira década deste século, quando o interesse pela modelagem paramétrica deu início a uma nova série de congressos dedicados exclusivamente a essa técnica, os SmartGeometry , o novo interesse pelos robôs por parte da comunidade de arquitetos é tão grande que, em dezembro deste ano, terá início uma nova série de conferências denominada Rob|Architecture. O evento será sediado em Vienna, mas contará com workshops espalhados por 6 cidades: Vienna, Roterdã, Stutgart, Graz e Zurich, além de Cambridge, Massachusetts, nos Estados Unidos. Segundo uma das organizadoras desse novo congresso, Sigrid Brell-Cokcan, dentre os inscritos há diversos arquitetos que trabalham para proeminentes escritórios de arquitetura, como o Herzog e de Meuron.
A robótica, no entanto, não foi a única tendência deste ano. A fabricação digital aparece agora com novos direcionamentos, como a produção automatizada de biomateriais, ainda de maneira especulativa e em escala de laboratório, mas mostrando algo que pode se tornar um novo direcionamento na área. Sérgio Araya, do MIT, por exemplo, desenvolveu uma proposta alternativa de fabricação digital, utilizando bactérias que eliminam resíduos de celulose. Projetando-se luz nos locais desejados, a partir de arquivos digitais, será possível orientar a proliferação desses resíduos camada por camada, como numa impressora 3D biológica.
Aplicações computacionais de técnicas de inteligência artificial para a otimização do projeto também estiveram presentes, tanto por meio da programação textual como por meio do uso de plugins, como o Galápagos, mais um componente para Grasshopper. Outro direcionamento que se pode notar diz respeito aos sistemas de avaliação de desempenho dos edifícios. O uso desses sistemas não é mais um fim em si; em geral aparece agora dentro de trabalhos com diferentes objetivos, confirmando que as recomendações do livro Performative Architecture, de Branko Kolarevic, já foram completamente assimiladas e incorporadas ao método de trabalho desses pesquisadores. Os sistemas de avaliação aparecem de forma “popularizada”, em aplicativos fáceis de usar no início do processo de projeto, como o Vasari, ou novamente em componentes para Grasshopper, como o Kangaroo (simulador de fenômenos físicos) e o Karamba (análise estrutural por elementos finitos). Mas mesmo com a disponibilidade de uma infinidade de aplicativos e componentes, a programação de aplicativos específicos ainda é muito utilizada, em especial o Processing, uma linguagem aberta, e o C sharp, com o qual é possível criar novas classes de objetos e componentes para o Grasshopper.
O Ecaade ofereceu também três palestras convidadas. John Gero, um dos pesquisadores mais renomados da área e criador do influente Key Center for Design Computing, na Universidade de Sydney, fez uma retrospectiva da pesquisas em Caad desde a década de 1960. Ao falar das pesquisas atuais Gero, que criou o ciclo de conferências Design Computing & Cognition, enfatizou os estudos cognitivos sobre o processo de projeto, auxiliado por modelagens computacionais. Jiri Bila, um professor da escola de engenharia mecânica da Universidade Técnica de Praga, apresentou, no segundo dia, aplicações de técnicas de inteligência artificial, como redes neurais e expert sistems, na modelagem de ecosistemas.
A última palestra do congresso foi da arquiteta tcheca Eva Jiricna, formada em Praga por volta do final dos anos 1960, e cujo escritório é sediado em Londres. Curiosamente, embora seja autora de inúmeros projetos construídos de altíssima qualidade, Jiricna enfatizou, em sua palestra, o uso da computação gráfica para a visualização e a apresentação de projetos a clientes. Embora obviamente essa não tenha sido a intenção dos organizadores ao convidá-la, esse fato mostra como muitos arquitetos ainda vêm a computação aplicada à arquitetura como algo cuja maior conquista é o fotorealismo. Por motivos como este, é possível notar que a cada ano as palestras convidadas vão perdendo sua importância em comparação com as apresentações de trabalhos de pesquisa, que despertam maior interesse por trazerem novidades resultantes da seriedade com que se tem tratado a pesquisa na área de Caad nas universidades de origem dos participantes do congresso.
Em resumo, é possível concluir que, a julgar pelo congresso Ecaade, o arquiteto contemporâneo precisa no mínimo ter domínio de ferramentas de modelagem paramétrica, saber usar ao menos os sistemas de avaliação do edifício simplificados que podem ser aplicados nas etapas iniciais do projeto, e conhecer muito bem os sistemas de fabricação digital.
P.S. Na volta ao Brasil dei uma paradinha em Barcelona para conhecer o incrível Cosmo Caixa, e notei que na lojinha do museu havia diversos kits para crianças montarem robôs de todo tipo: que varriam ou que desenhavam, movidos a pilha ou a energia solar. Fiquei pensado: como será a futura geração de arquitetos que, quando crianças, montaram robôs de brinquedo?
sobre a autora
Gabriela Celani é membro do comitê executivo do SIGRADI e professora do curso de Arquitetura e Urbanismo da Unicamp, e viajou a Praga com patrocínio da Fapesp e da Architectural Computing Organization para apresentar dois trabalhos desenvolvidos no Laboratório de Automação e Prototipagem para Arquitetura e Construção (Lapac).